首页
关于我们
关于我们
产品中心
高空特种机器人
风电场智能运维机器人
工业机器人及自动化设备
特种检测机器人
仿生机器人
机器人租赁
资讯中心
资讯动态
招聘资讯
招贤纳士
招贤纳士
在线留言
在线留言
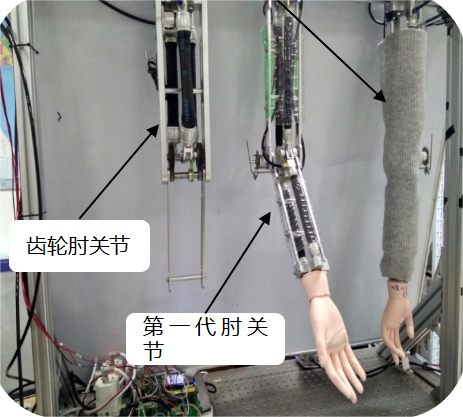
人工肌肉仿人肢体关节
来源:
未知
日期:
2026-03-29 23:15
浏览:
气动肌肉级联肘关节样机,确定四连杆尺寸及驱动器的型号和长度,利用SolidWorks软件设计了四连杆肘关节的三维样机。
最大旋转角度是衡量肘关节机构设计是否合理的重要指标之一
空载下,收缩侧气动肌肉内部压力最大时,肘关节下臂的旋转角度最大,最大至107°。
设计四连杆机构转动机构,转动特性与人体关节相似。肘关节空载转动范围达0~100°,肘关节负载12kg转动角度为90°
0
上一篇:
气动肌肉四足机器人
下一篇:
仿生两栖机器人
首页
电话
短信
联系